IFSolver Reloaded 系列 0x02:特征匹配
在这篇文章里,将详细介绍 IFSolverR 是如何匹配特征的,这是本次更新中最核心的环节。
简要介绍
与先前的 IFSolver 不同,使用 SIFT 进行全图匹配一定会引入一些错误的特征点,如何判断某个匹配是否是符合要求的,以及如何处理图中存在的多个匹配,是本节需要关注的主要问题。
粗匹配
1 | |
通过这样的过程,可以实现对 d(Portal 图片特征) 和 dFull(IFS 谜题全图特征) 的暴力匹配。
而 BFMatcher 里面是这样的:
1 | |
通过测量,0.6 倍距离作为筛选边界是较为合适的,这会影响到检测到的特征点个数。
筛选匹配
然而,这样产生的匹配很可能也存在不符合标准的状况。嘤为 SIFT 本身是一种匹配能力极强的算法,当遇到稍有相似但角度不同的 Portal 图片时,依然能够被识别出来并被认为是一个合理的匹配。
同时,我们需要做的并不只是匹配图片,还需要找到匹配区域的几何中心,即图片的中心点,以方便后续的自动化生成解谜结果。
但很显然,一次匹配是无法区分出所有的匹配图片,并进行筛选的,因此我们需要这样的操作:
- 通过映射关系,查找 Portal 图片在谜题图片上的边缘,这里就是对图片生成一个 3x3 的最优单映射变换矩阵(矫正矩阵) M,使得 $ A_{portal} * M = A_{puzzle} $。
- 然而,这样的矩阵并不一定存在,如果不存在这样的矩阵,说明这不是一个有效的组合。
- 排除以上情况后,可以通过
perspectiveTransform和上述矩阵 M 确定变换后的边缘坐标。 - 同时,我们需要保证这样的坐标的长宽比符合要求,并且是一个凸多边形。
- 随后,我们对匹配的区域生成一个 mask,将上述匹配成功的区域内的特征点排除(
logical_not)。 - 重复以上操作直至匹配到的特征点低于 4 个,此时我们不认为它们能确定一个映射,匹配过程结束。
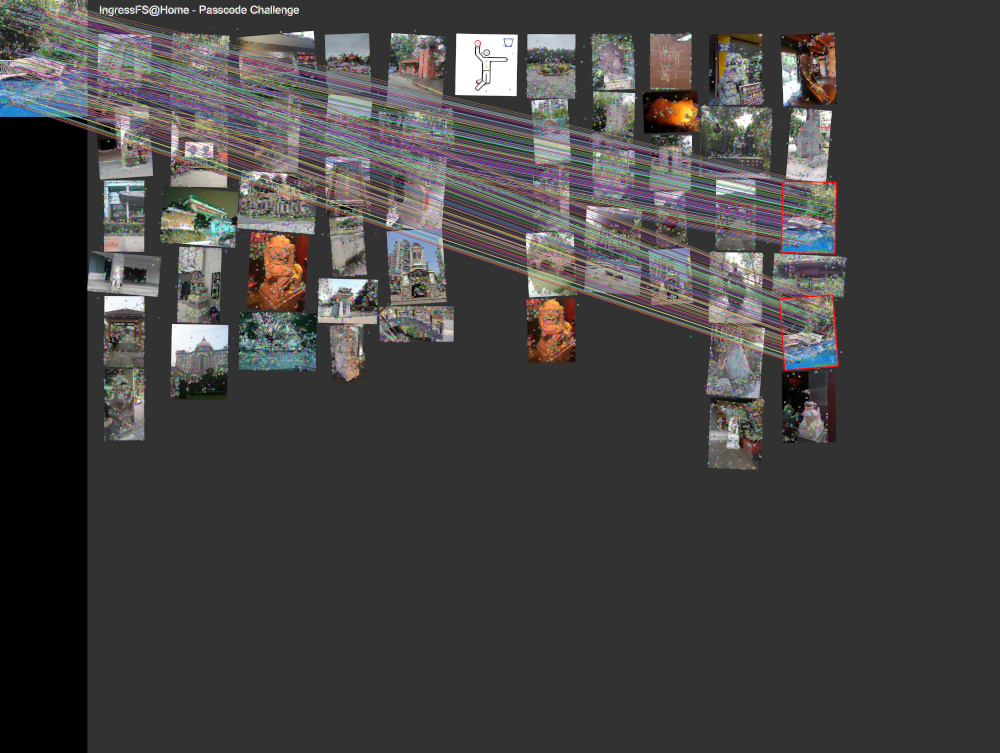
然后程序也会存储一份特征匹配的图片以供参考和调试。
拓展
在下一节还会讲到,这样的匹配规则依然会存在重复匹配和错误匹配的可能性(虽然不高),因此在需要人工干预会有提示。如何进一步提升匹配的准确性,可能的办法是,将区域重叠率高的图片进行裁剪,进行 1:1 匹配,然后再根据匹配吻合度优选。
IFSolver Reloaded 系列 0x02:特征匹配
https://0x7f.cc/ifsolverr-0x02/